

|
05.08.2013.
Предлагаем Вам воспользоваться нашим бесплатным конструктором визиток
. Понятный и простой интерфейс позволит создать свой собственный неповторимый дизайн визитки.
|
Выбираем полетный контроллер для квадрокоптера
26.02.2019
Количество полетных контроллеров, имеющихся в продаже может смутить новичка. Цель этой статьи — показать каким образом можно выбрать полетный контроллер для вашего коптера.
Если вы только начинаете летать, тогда не забудьте прочесть руководство для начинающих пилотов гоночных коптеров .
Содержание
Что такое полетный контроллер?
Полетный контроллер (ПК, flight controller, FC) — это мозг летательного аппарата. По сути, это схема, которая собирает данные с датчиков и команды от пользователя и делает некоторые изменения в скорости вращения моторов для того, чтобы коптер оставался в воздухе.
У всех ПК имеется базовый набор датчиков: гироскопы (Gyro) и акселерометры (acc); некоторые продвинутые конфигурации имеют также барометр и магнетометр (компас).
ПК — это также точка подключения всей прочей периферии типа GPS, светодиодов, сонаров и т.д.
Контроллеры для гоночных дронов очень быстро эволюционируют: становятся меньше, имеют всё более быстрые процессоры, более современные датчики и всё больше встроенных функций.
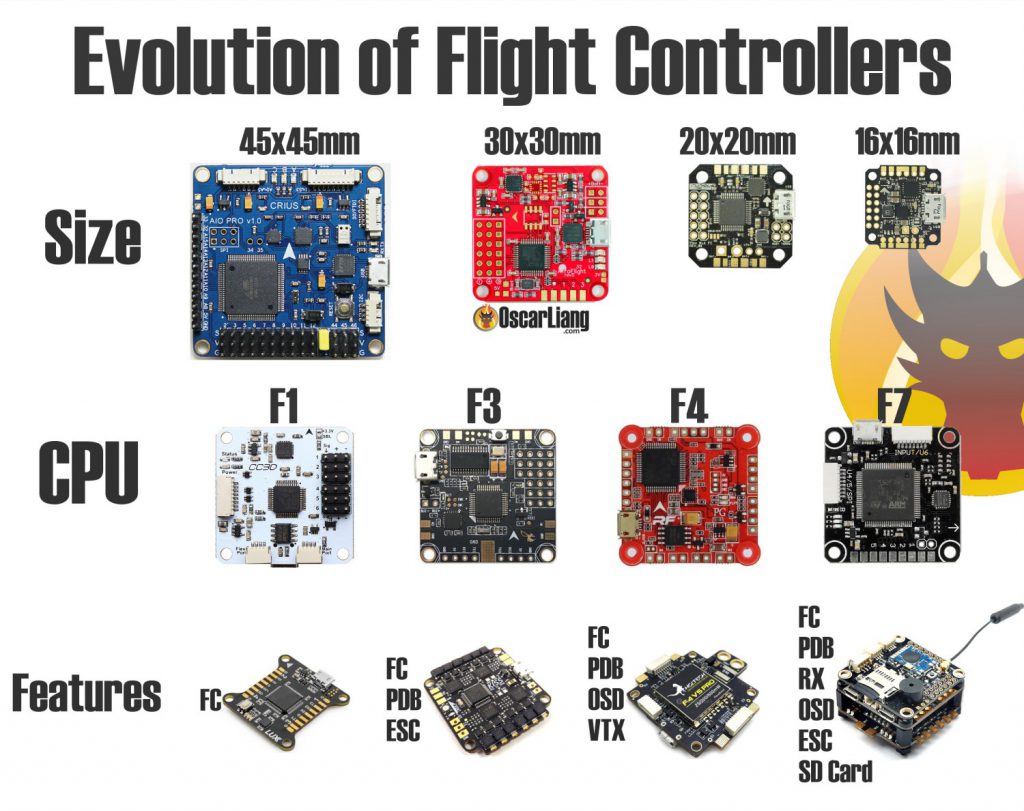
Эволюция полетных контроллеров
Прошивки для ПК
Помимо различий в железе, имеются различия и в прошивках, а также в программах для компьютера.
Вот список прошивок (и их описание) для миникоптеров . Если вы совсем в этом не разбираетесь, то мой вам совет, используйте Betaflight, Raceflight или KISS. У них отличные летные характеристики.
Современные прошивки для ПК можно настраивать используя специальные программы, установленные на компьютер или смартфон; или даже прямо с пульта управления.
«Тюнинг» — этот термин мы используем, когда меняем ПИД коэффициенты, рейты и некоторые другие настройки. При помощи тюнинга мы можем настроить коптер «под себя».
ПО для компьютеров имеет графический интерфейс, а набор доступных настроек отличается в зависимости от прошивки, так что есть некоторый входной уровень знаний при их использовании.

Самые популярные прошивки для полетных контроллеров
После того, как вы выберите прошивку ищите совместимый с ней полетный контроллер.
Процессор (микроконтроллер)
В настоящее время есть 4 основных типа процессоров: F1, F3, F4 и F7. Мы рекомендуем брать F3 или F4, т.к. прошивки уже уперлись в возможности F1 и дальше его нормально не поддерживают, а F7 — довольно новый, и требуется время для полной адаптации прошивок.
| F1 | F3 | F4 | F7 |
| 72 МГц | 72 МГц | 168 МГц | 216 МГц |
Подробнее про различия между сериями процессоров F1, F3, F4 и F7

Процессоры для ПК (слева направо): STM32 F1, F3, F4
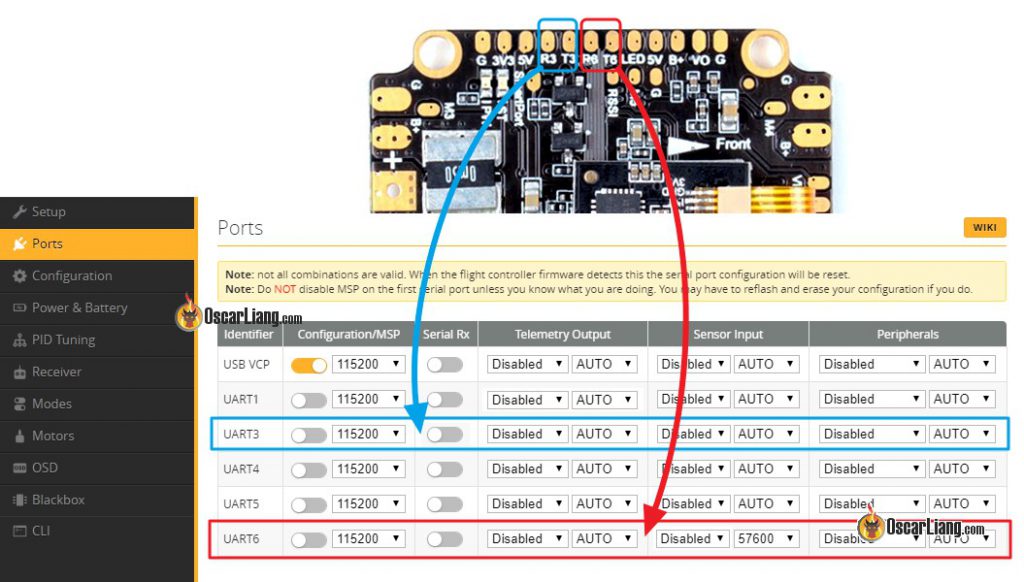
UART (последовательные порты)
UART расшифровывается как Universal Asynchronous Receiver/Transmitter, что означает асинхронный последовательный порт.
UART — это, как правило, аппаратный последовательный интерфейс, который позволит вам подключить разные внешние устройства к полетному контроллеру. Например, приемник, телеметрию, транспондер для гонок, управление видеопередатчиком и т.д.
У каждого последовательного порта два контакта: TX — для передачи, RX — для приема.
Пример: на полетнике есть UART3 и UART6. Вы можете назначить им задачи на вкладке Ports в Betaflight конфигураторе.
Количество последовательных портов в полетном контроллере
Возможно, вам потребуются (а может и нет) дополнительные последовательные порты, чем больше свободных есть, тем проще будет в будущем.
Количество портов зависит от дизайна платы и используемого процессора. Например, на ПК с F1 обычно только 2 порта, у F3 и F4 может быть от 3 до 5, а у F7 — семь или даже больше.
| F1 | F3 | F4 | F7 |
| 2 порта | 3-5 портов | 3-6 портов | 7 и более |
Инвертирование сигнала последовательного порта
Процессоры F3 и F7 могут инвертировать сигнал встроенным инвертором, а F1 и F4 — нет.
Сигналы Frsky SBUS и SmartPort являются инвертированными, поэтому владельцам ПК на F3 и F7 повезло, такие данные понимаются без проблем (F3 и F7 — более новые серии процессоров, подробнее тут ).
Однако, более старые процессоры, типа F1 и F4 требуют наличия внешнего инвертора сигнала, который и подключается к соответствующему последовательному порту. Для удобства пользователей некоторые ПК на F4 уже имеют схемы для инверсии сигналов SBUS и SmartPort, так что приемник подключается напрямую к ПК. Если встроенного инвертора нет, то вам придется использовать одно обходных решений, например, программную эмуляцию последовательного порта (soft serial) или найти неинвертированный сигнал на приемнике .
Если портов не хватает, можно использовать программную эмуляцию (soft serial) чтобы создать ещё больше портов. К сожалению, эмулируемые порты работают медленнее аппаратных (нельзя выставить большую скорость) и не подходят для важных задач, где требуется быстрая реакция, например не подойдут для работы с приемниками. Ну и, конечно, программная эмуляция требует довольно много ресурсов процессора.
Гироскопы (Gyro), инерциальная навигация (IMU)
Цель датчиков на ПК определить ориентацию коптера и его движения. Микросхема с датчиками (IMU) содержит как гироскопы, так и акселерометры, но так как большинство FPV пилотов используют Acro Mode, то акселерометры обычно отключаются. Т.е. под IMU обычно подразумеваются только гироскопы (gyro).
Наиболее популярные гироскопы, используемые в полётниках:
| IMU | Способ подключения, шины | Макс. частота сэмплирования |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
* MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 с тем же магнитометром.
Выяснить тип можно взглянув на маркировку микросхемы, вот для примера популярный вариант Invensense MPU-6000.

Гироскопы и акселерометры на полетном контроллере
Выбор гироскопов: что лучше высокая частота опроса или шум?
У IMU есть две основные характеристики: максимальная частота семплирования и насколько полученные данные будут зашумлены (механическими вибрациями и электрическими помехами).
В настоящее время очень часто используют микросхему MPU6000 , которая поддерживает частоту опроса до 8k, и обладает (неоднократно проверено) хорошей устойчивостью к разного рода шумам и помехам. Главное стараться избегать MPU6500 и MPU9250 , хотя у них больше рабочая частота, но и уровень шумов тоже значительно выше.
Скорость работы гироскопов — это палка о двух концах: если питание чистое, и шумов нет, тогда серия ICM на 32k будет работать лучше, чем MPU6000. Однако, если регуляторы и моторы генерят довольно много помех, а коптер вибрирует, тогда ICM хуже, чем MPU6000.
Например, ICM20602 стоит на Raceflight Revolt V2, а ICM20689 на Kakute F4 , оба работают на частоте 32k. Однако, в обзорах часто упоминают, что эти гиры более чувствительны к шумам, чем MPU6000, поэтому вышеупомянутые ПК лучше крепить с демпферами ( антивибрационное крепление ) и использовать конденсаторы для фильтрации помех по питанию , это поможет снизить шум.
В последнее время появляется всё больше и больше ПК с гироскопами на отдельной плате с антивибрационной развязкой (кусок поролона, чтобы снизить вибрации от моторов).

Антивибрационное крепление гироскопов на ПК Kakute F4
i2c или SPI?
i2c и SPI — это названия шин для подключения гироскопов к процессору. Выбранная шина может ограничить частоты опроса гироскопов и ограничит looptime.
Лучше всего использовать SPI , т.к. она позволяет работать с бОльшими частотами, чем i2c , у которой лимит в 4k.
Встроенные функции
OSD
OSD может показывать разную информацию на экране: напряжение аккумулятора, таймер и т.д. Те, кто знакомы с MinimOSD помнят сложность настройки, но если вам нравится эта функциональность, тогда выбирайте ПК с OSD.
Betaflight OSD настраивать значительно проще.
PDB
PDB или плата распределения питания — достаточно часто встречается в современных ПК, так что регуляторы скорости и основной LiPo аккумулятор подключаются напрямую к полётнику. Благодаря тому, что ПК и PDB это одна плата, а не две, мы экономим место в раме, упрощается разводка и пайка проводов. Недостаток такого решения — у некоторых ПК очень маленькие контактные площадки для пайки.
Датчик тока
Необходимость датчика тока не подлежит сомнению, потребляемый ток и съеденная емкость гораздо полезнее, чем просто напряжение аккумулятора, да и для тестов пригодится.
Подробнее про датчик тока и его калибровку (англ).
Регуляторы скорости
Встроенной PDB недостаточно? Есть ПК со встроенными регуляторами! Это значит, что моторы нужно подключать непосредственно к полетному контроллеру, что ещё больше упрощает сборку.
RacerStar Tattoo F4S FC — первый такой ПК в моих руках.
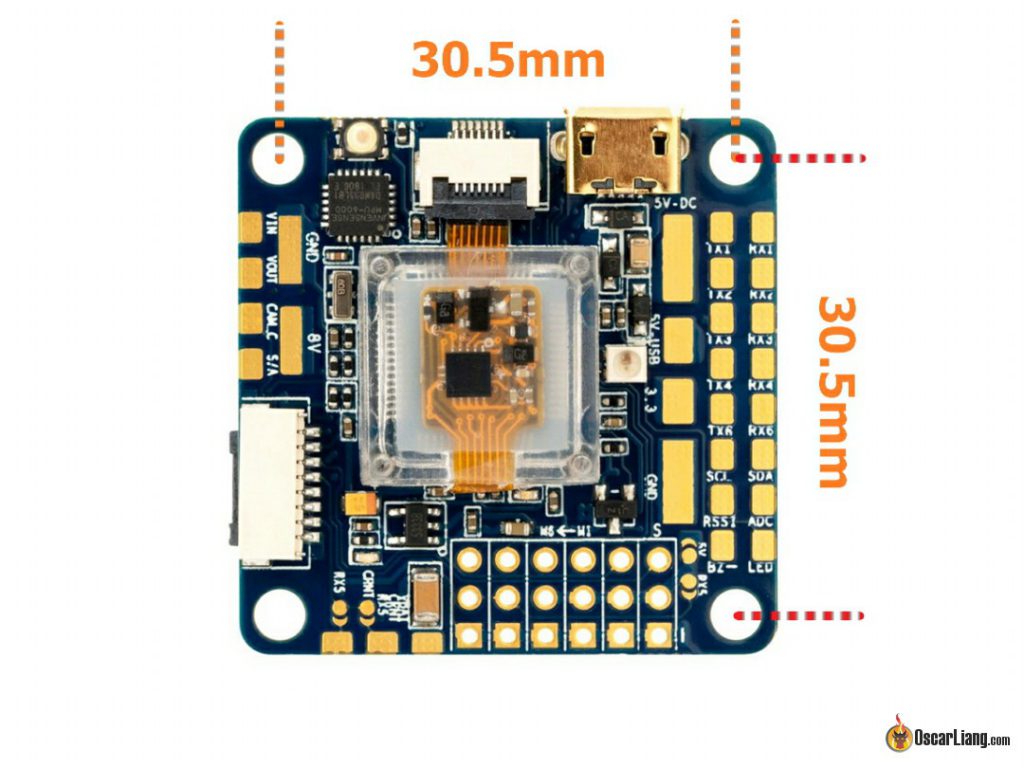
Формат крепежа
В данном случае подразумевается расстояние между крепежными отверстиями в плате полетного контроллера. Обычно это 30,5 х 30,5 мм, 20 х 20 мм или 16 х 16 мм. Формат крепежа определяет как размеры платы, так и размеры модели. В коптерах с 5″ пропами обычно используются ПК с крепежом 30,5 х 30,5, в более мелких коптераз — 20 х 20 мм. Формат 16 х 16 мм набирает популярность в классе коптеров с диагональю до 100 мм.
Прочие функции
Blackbox (черный ящик): чип флэш-памяти или MicroSD карточка?
Данные черного ящика (англ.)
Есть два способа записать и сохранить данные черного ящика: на чип флэш-памяти установленный на плате ПК или на MicroSD карточку, вставленную в слот.
Чип памяти дешевле, но как правило он имеет небольшую емкость и хранит относительно немного данных, обычно 10-15, иногда 20 минут полетного времени (в зависимости от частоты запрашиваемых данных). Кроме того, загрузка данных с этого чипа идет довольно медленно, может уйти до 5 минут времени на загрузку лога длиной всего 1 минуту.
ПК со встроенным слотом для MicroSD карточек, позволяют хранить данные неделями, без необходимости очистки свободного места. Кроме того, чтение логов очень быстрое.
На мой взгляд выбирать нужно в зависимости от того, как часто вы планируете использовать черный ящик. Если хотите серьезно изучать полетные данные, тогда точно нужно брать ПК с MicroSD слотом.
Кстати, есть еще третий вариант — можно купить внешний логгер (Open Logger) со слотом для microSD и подключить его через свободный UART к ПК.
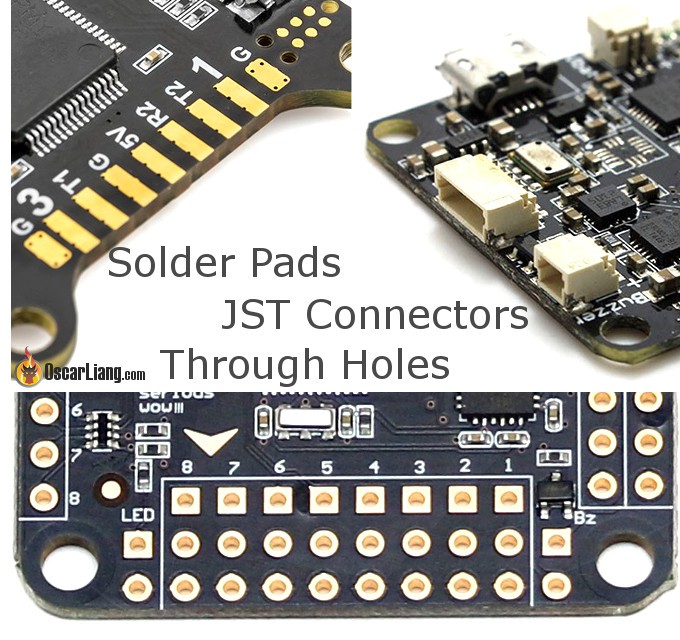
Типы разъемов
Три основных типа разъемов на полетных контроллерах:
Пластиковые разъемы типа JST Контактные площадки («пятаки») для непосредственной пайки проводов Сквозные отверстияПластиковые разъемы менее надежны, но при этом позволяют быстро отключать/подключать кабели. Контактные площадки более крепкие, но есть риск их перегреть при пайке, и они отслоятся от платы. Наиболее универсальный вариант — сквозные отверстия: можно припаять провода или штыревые разъемы.
BEC (стабилизатор напряжения)
В большинстве полётников уже есть стаб на 5 вольт. В некоторых есть и на 9, и 12 вольт (или на какое-нибудь другое напряжение).
Несмотря на то, что значительную часть FPV оборудования (камеры, видеопередатчики) можно подключать напрямую к литиевому аккумулятору, я считаю, что изображение будет лучше, если питать их через стабилизатор.
Подробнее про подключение FPV оборудования для минимизации помех (англ).
Кнопка boot (активация загрузчика)
Нажатая кнопка boot при подаче питания переводит процессор полетного контроллера в режим загрузчика (bootloader mode). В этом режиме можно обновить прошивку, даже если стандартные программы этого сделать не могут.
Подробнее про кнопку загрузчика (boot button)
У многих ПК есть два контакта которые нужно закорачивать для этой цели. Но гораздо приятнее, когда есть кнопка.
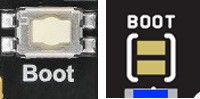
Слева кнопка загрузчика, справа — контакты для этой же цели
Прочие, полезные вещи, которые иногда встречаются в полетных контроллерах
Встроенный видеопередатчик — главное преимущество: экономия места и веса, у некоторых видеопередатчиков можно менять настройки прямо через контроллер Барометр / магнитометр (компас) — это дополнительные датчики, которые совсем не обязательны для гонщиков Поддержка протоколов приемника — убедитесь, что ПК поддерживает протокол вашего приемника : PWM, PPM, SBUS, Spektrum Satellite и т.д. «Все-в-одном» — такой полетный контроллер состоит из одной платы, на которой есть всё необходимое: PDB, регуляторы, приемник и т.д. Недостаток — если что-то сгорит, то скорее всего придется менять плату целиком Поддержка инфракрасного транспондера — позволяет вам изменять время круга самостоятельноВыбор полетного контроллера
Наиболее полный и актуальный список полетных контроллеров для миникоптеров можно найти тут: https://blog.rcdetails.info/polnyj-spisok-komplektuyushhih-dlya-fpv-mini-kopterov-250-razmer/#fc
Топ 5 лучших полетных контроллеров смотрите тут: https://blog.rcdetails.info/top-5-luchshih-poletnyh-kontrollerov-mart-2017/ (регулярно обновляется).